KKA Koding dan Kecerdasan Artifisial - Bermuatan SPAB Satuan Aman Pendidikan
Materi KKA Bermuatan SPAB

https://drive.google.com/file/d/1QPfyG79SeZob-GKsxKlUKp9PDD0lm0NM/view?usp=sharing
Bantuan AI Claude:
- Buka website: Kunjungi claude.ai
- Klik "Continue with Google"
- Pilih akun Gmail: Pilih akun Gmail Anda
- Masukkan nomor telepon: Wajib isi nomor HP Indonesia (+62)
- Verifikasi SMS: Masukkan kode OTP yang dikirim ke HP
- Selesai: Akun siap digunakan
1. Siapkan bahan atau dokumen yang diupload
Alamat sekolah :
Risiko bencana :
Jumlah warga sekolah
Bencana yang pernah terjadi
Dst
Alamat sekolah :
Risiko bencana :
Jumlah warga sekolah :
Bencana yang pernah terjadi :
Contoh Simulasi Wokwi :
Sensor Banjir:
https://ayojurnalku.blogspot.com/2023/03/esp8266-hcsr04-sensor-ultrasonic-buzzer.html
 |
https://wokwi.com/projects/435046052018934785
Sensor Palang Pintu Kereta Api:
https://wokwi.com/projects/435045838698722305
https://wokwi.com/projects/435045952065520641

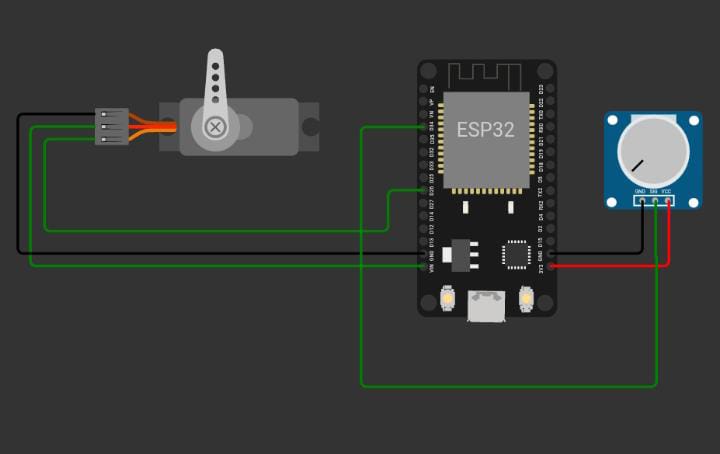
Servo ESP32 - CODING 1


PELATIHAN KKA


Materi Webinar :
Pengurus Diklat IGI Jawa Timur

Contoh Immplementasi KKA pada Pembelajaran:
KKA (AI) untuk belajar bahasa percakapan bahasa inggris :Level Pemula : https://quickdraw.withgoogle.com/
Level Lanjutan : https://aistudio.google.com/live
KKA (AI) untuk belajar Kelestarian Laut
https://studio.code.org/courses/oceans/units/1/lessons/1/levels/2
KKA (AI) untuk Computer Vision
https://teachablemachine.withgoogle.com/
Servo ESP32 - CODING 2
.jpg)
Servo Arduino Uno - CODING 3


Coding 3:
#define ECHO_PIN 3
#define TRIG_PIN 2
#define pinBuzzer 5
#include <Servo.h>
Servo myservo;
int rotasi = 90;
int interval = 0;
float readDistanceCM(){
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
int duration = pulseIn(ECHO_PIN, HIGH);
return duration * 0.034/2;
}
void soundBuzzer(){
if(interval < 500){
tone(pinBuzzer, 250);
}else
if(interval > 500){
tone(pinBuzzer, 100,800);
};
}
void setup() {
// put your setup code here, to run once:
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
Serial.begin(115200);
pinMode(pinBuzzer, OUTPUT);
myservo.attach(9);
myservo.write(90);
}
void loop() {
// put your main code here, to run repeatedly:
tutupPalang();
interval +=100;
if(interval>1000) interval = 0;
}
void tutupPalang(){
float jarak = readDistanceCM();
if(jarak > 0 && jarak < 100 ){
soundBuzzer();
tutup();
}else{
buka();
noTone(pinBuzzer);
}
}
void tutup(){
if(rotasi <= 90){
myservo.write(rotasi);
delay(100);
rotasi--;
}
if(rotasi <= 0 ) rotasi = 0;
}
void buka(){
if(rotasi <= 90){
myservo.write(rotasi);
delay(100);
rotasi+=4;
}
if(rotasi >= 90 ) rotasi = 90;
}











No comments