Membuat Drone ESP8266 (Mampu Terbang dan Merayap)
Make ESP8266 Drone
(This Drone Can Climb on Wall)

You know what is the function of a drone, just can fly if I tell you that my drone can climb on wall or go underwater like a submarine, You would think that this is making you crazy, so let’s not go, today we will show you by making it.
For a drone we need a flight controller but we don’t have much money for flight clontroller So don’t worry already made my own flight controller if you haven’t seen my earlier project then go and see I have made a very cheap flight controller using ESP8266 in it I have given the link below.
ESP8266 Drone GuideThank You NextPCB
This project is successfully completed because Help from NextPCB. Guys if you have a PCB project, please visit their website and get exciting discounts and coupons.
Only 0$ for 10pcs 1-4 layer PCBs:https://www.nextpcb.com/pcb-quote
Sign up and get 100$ coupon: https://www.nextpcb.com/pcb-quote?act
So here, I am sharing step by step build instruction of my ESP8266 based Drone.
Supplies For Esp8266 Drone
Table of Contents
Components Required (let’s have a look at the main components of a drone)
_files/Screenshot_20220407-062333.png)
_files/Screenshot_20220407-062509.png)
- Esp8266_____________________________________ https://amzn.to/3LDdxJ8
- MPU6050 Acc/Gyro Module__________________https://amzn.to/3uchUox
- brushed motors and prop______________https://amzn.to/37oBzZj
- Propellers_____________________________https://amzn.to/3DKXx5b
- 500 mAh lipo 3.7v____________________https://amzn.to/3JhTe24
- Si2302 mosfet (5x)
- Pencils
If you are electronics hobbyist than you will find All parts listed below in your inventory -:)
Tools Used:
- Soldering Iron_____________https://amzn.to/3DURZoD
A drone will consist of frame, motors, propellers, electric motor, flight controller, battery, Here is a short summary of each parts of a quadcopter.
Flight Controller:
The flight controller (a.k.a FC) is the brain of the aircraft. it’s a circuit board with a range of sensors that detect movement of the drone, as well as user commands. If you tell it to go forward, the flight controller will adjust the RPM of the rear motors so that it goes forward.
ESP8266 Module
To communicate with the drone we will need bluetooth or wifi connection so we are using Esp8266 Wi-Fi module because it has inbuilt Wi-Fi, we can use it for communicate. Talking about range of the Drone.. I have got around 70 meter range using my Samsung mobile acting as WiFi Hotspot and remote controller.
Mpu6050
MPU6050 IMU, a low-cost device that contains both a gyroscope and accelerometer. We will use the MPU-6050 with an Esp8266 module to build an Drone. Learn more About MPU-6050 and Arduino.
Coreless Motor
Coreless Motor are Mini motors used in Quadcopter and Drones, These motor are coreless it mean they do not have metal core in the rotor, Coreless motors can achieve higher RPM with less load. These motors are suitable for micro drones, quadcopters or Mini projects.
Propellers
There’s no challenge that without drone propellers, The purpose of your propeller is to generate thrust and torque to keep your drone flying.
Schematic for Esp8266 Drone Flight Controller
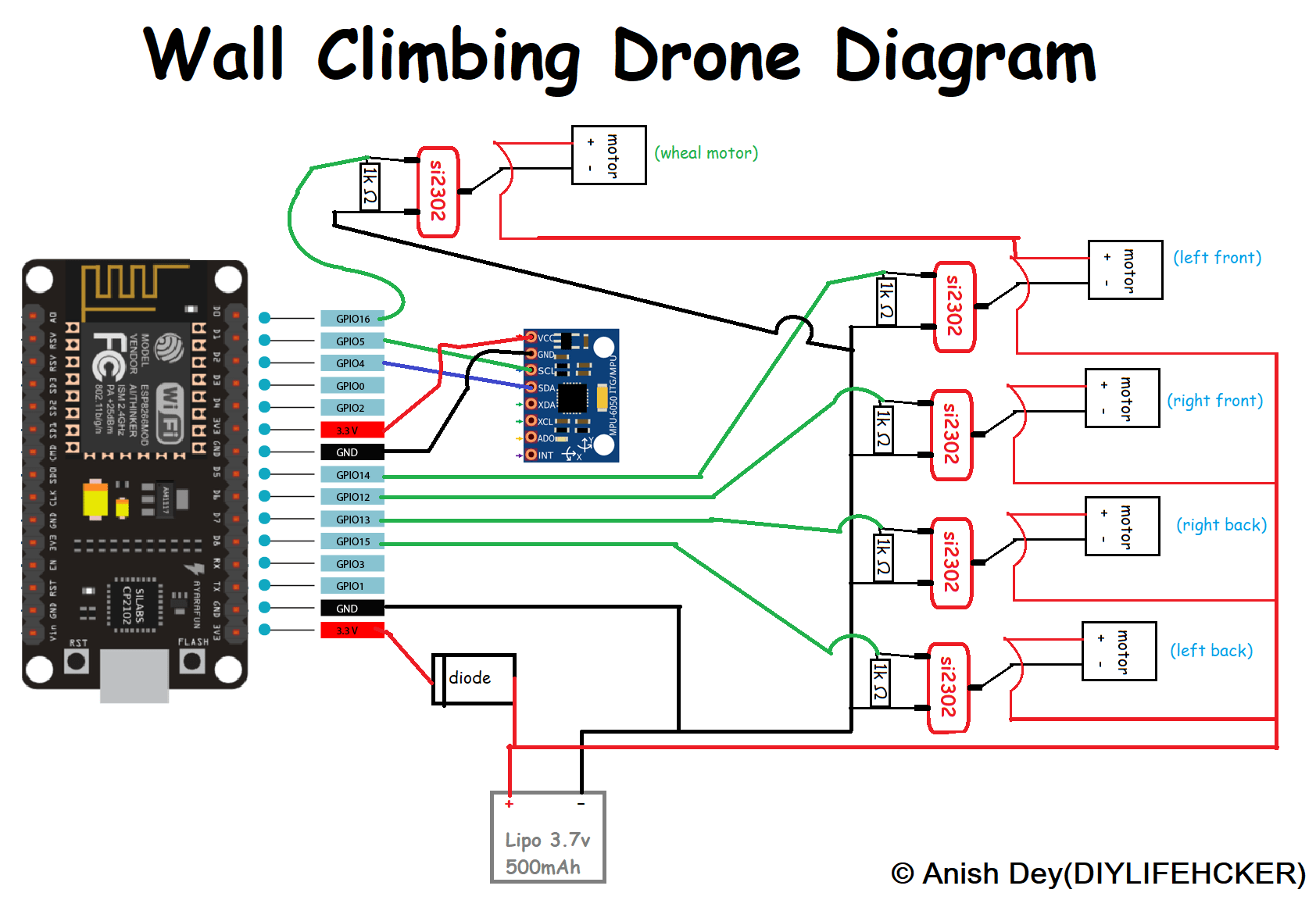
Make the Circuit : Make the circuit by following the schematic diagram given in the above picture.
I have already explained the connection details of each component

Build Frame
Frame: The frame provides the structure and rigidity and it’s where all the components will be mounted onto. Chose wooden pencils then i gave it shape of your quadcopter.




Assembling the frame and mounting the ESP8266 flight controller, The first thing we need to do is assemble the frame. i used pencil for fram if you have 3d printer then you can print a good frame.
Software for Esp8266 Drone
Using Arduino IDE: If you want to edit (i.e. SSID and password of WiFi network – Android Hotspot in this case) than this is best method to follow.
- Install Arduino IDE
- Install ESP8266 Boards
- Install ESP8266WiFi.h library
- Copy code and put your own wifi SSID and password in code
-
- Setup Arduino IDE for ESP8266 by following this excellent Instructable.
- Download esp8266drone.ino from attachment of this step.
- Open Arduino IDE and copy code from esp8266drone.ino
- and paste it in to Arduino IDE.
- Edit SSID and Password of your network in the code by editing following two lines.
- Connect ESP8266 to your computer
- Hit Upload button from Arduino IDE a.
- If all goes fine than you can See blue LED on ESP8266 start flashing at every one second.
Android App Setup and Testing Esp8266 Drone
Android App Installation:
You just need to download app-debug.apk file attached with this step to your smartphone.
- This Android App is developed using Processing for Android.
Installation of Android Application for WiFi plane to your smartphone is quite easy and its step by step in this video.
Once Android App is up and running on your smart phone, refer above video to know how App works and various cool features of the app..
It’s Time to Fly
Ready to fly?…
- GET IN TO THE FIELD
Video Explaination :
_files/hqdefault.jpg)
I am sure, You gonna fall in love with it…
ENJOY…………….HAPPY MAKING……………HAPPY FLYING……………….
Your Questions/Comments/Suggestions are welcome…
Hope you Liked and Enjoyed.
Cheers,
Check our previous Drone Projects











No comments